


Section: New Results
Life-Long Robot Learning And Development Of Motor And Social Skills
Uncalibrated BCI
Participants : Manuel Lopes [correspondant] , Pierre-Yves Oudeyer, Jonathan Grizou, Inaki Iturrate, Luis Montesano.
We developed an new approach for self-calibration BCI for reaching tasks using error-related potentials. The proposed method exploits task constraints to simultaneously calibrate the decoder and control the device, by using a robust likelihood function and an ad-hoc planner to cope with the large uncertainty resulting from the unknown task and decoder. The method has been evaluated in closed-loop online experiments with 8 users using a previously proposed BCI protocol for reaching tasks over a grid. The results show that it is possible to have a usable BCI control from the beginning of the experiment without any prior calibration. Furthermore, comparisons with simulations and previous results obtained using standard calibration hint that both the quality of recorded signals and the performance of the system were comparable to those obtained with a standard calibration approach. [30]
Learning from Demonstration
Participants : Manuel Lopes, Thibaut Munzer [correspondant] , Marc Toussaint, Li Wang Wu, Yoan Mollard, Andrea Baisero, Bilal Piot, Matthieu Geist, Olivier Pietquin.
Learning from Demonstration
Relational Activity Processes for Modeling Concurrent Cooperation
In multi-agent domains, human-robot collaboration domains, or single-robot manipulation with multiple end-effectors, the activities of the involved parties are naturally concurrent. Such domains are also naturally relational as they involve multiple objects, multiple agents, and models should generalize over objects and agents. We propose a novel formalization of relational concurrent activity processes that allows us to transfer methods from standard (relational) MDPs, such as Monte-Carlo planning and learning from demonstration, to concurrent cooperation domains. We formally compare the formulation to previous propositional models of concurrent decision making and demonstrate the planning and learning from demonstration methods on a real-world human-robot assembly task.
Interactive Learning
In paper [56] we consider that robot programming can be made more efficient, precise and intuitive if we leverage the advantages of complementary approaches such as learning from demonstration, learning from feedback and knowledge transfer. We designed a system that, starting from low-level demonstrations of assembly tasks, is able to extract a high-level relational plan of the task. A graphical user interface (GUI) allows then the user to iteratively correct the acquired knowledge by refining high-level plans, and low-level geometrical knowledge of the task. A final process allows to reuse high-level task knowledge for similar tasks in a transfer learning fashion. We conducted a user study with 14 participants asked to program assembly tasks of small furniture (chair and bench) to validate this approach. The results showed that this combination of approaches leads to a faster programming phase, more precise than just demonstrations, and more intuitive than just through a GUI.
Inverse Reinforcement Learning in Relational Domains
We introduced a first approach to the Inverse Reinforcement Learning (IRL) problem in relational domains. IRL has been used to recover a more compact representation of the expert policy leading to better generalize among different contexts. Relational learning allows one to represent problems with a varying number of objects (potentially infinite), thus providing more generalizable representations of problems and skills. We show how these different formalisms can be combined by modifying an IRL algorithm (Cascaded Supervised IRL) such that it handles relational domains. Our results indicate that we can recover rewards from expert data using only partial knowledge about the dynamics of the environment. We evaluate our algorithm in several tasks and study the impact of several experimental conditions such as: the number of demonstrations, knowledge about the dynamics, transfer among varying dimensions of a problem, and changing dynamics. This was published in [49]
A Unified Model for Regression
Regression is the process of learning relationships between inputs and continuous outputs from example data, which enables predictions for novel inputs. Regression lies at the heart of imitation learning, and value function approximation for reinforcement learning. In [37] , we provide a novel perspective on regression, by distinguishing rigoroulsy between the models and representations assumed in regression, and the algorithms used to train the parameters of these models. A rather surprising insight is that many regression algorithms (Locally Weighted Regression, Receptive Field Weighted Regression, Locally Weighted Projection Regression, Gaussian Mixture Regression, Model Trees, Radial Basis Function Networks, Kernel Ridge Regression, Gaussian Process Regression , Support Vector Regression Incr. Random Features Regularized Least Squares, Incr. Sparse Spectrum Gaussian Process Regr., Regression Trees, Extreme Learning Machines.) use very similar models; in fact, we show that the algorithm-specific models are all special cases of a “unified model”. This perspective clearly seperates between representations and algorithms, and allows for a modular exchange between them, for instance in the context of evolutionary optimization.
Multiple Virtual Guides
In co-manipulation, humans and robots solve manipulation tasks together. Virtual guides are important tools for co-manipulation, as they constrain the movement of the robot to avoid undesirable effects, such as collisions with the environment. Defining virtual guides is often a laborious task requiring expert knowledge. This restricts the usefulness of virtual guides in environments where new tasks may need to be solved, or where multiple tasks need to be solved sequentially, but in an unknown order.
To this end, we have proposed a framework for multiple probabilistic virtual guides, and demonstrated a concrete implementation of such guides using kinesthetic teaching and Gaussian mixture models [57] , [58] . Our approach enables non-expert users to design virtual guides through demonstration. Also, they may demonstrate novel guides, even if already known guides are active. Finally, users are able to intuitively select the appropriate guide from a set of guides through physical interaction with the robot.
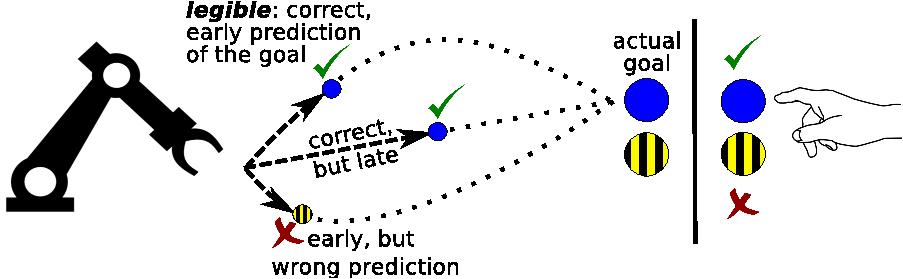
Legible Motion
Participants : Manuel Lopes, Baptiste Busch [correspondant] , Jonathan Grizou, Freek Stulp.
In a human-robot collaboration context, understanding and anticipating the robot intentions ease the completion of a joint-task. Whereas previous work has sought to explicitly optimize the legibility of behavior, we investigate legibility as a property that arises automatically from general requirements on the efficiency and robustness of joint human-robot task completion. We propose an optimization algorithm, based on policy improvement, that brings out the most legible robot's trajectories during the interaction (cf. Figure 11 ). The conducted user study highlights that humans become better at predicting sooner the robot’s intentions. This leads to faster and more robust overall task completion. This work have been published to IROS 2015[60] and was submitted to the International Journal of Social Robotics under the special issue: Towards a framework for Joint Action.
|
Demonstrator of human-robot interface for teaching a collaborative task in the context of assistive robotics
Participants : Pierre Rouanet [correspondant] , Yoan Mollard, Thibaut Munzer, Baptiste Busch, Manuel Lopes, Pierre-Yves Oudeyer.
In the context of the Roméo 2 project, we have developed a demonstrator of a human-robot interface designed for non-expert users. It allows them to teach a new collaborative task to a robot through simple and intuitive interactions. It is based on the approach of inverse reinforcement learning in relational domains described above.
The context of the demonstrator is assistive robotics where typically an elderly person wants to teach a robot (we use Baxter in this case) how it can help him to prepare a meal. For instance, the user will show the robot that first he wants the robot to hold its bowl and that he stirs it. Then, the robot should put the bowl on a plate. Then, the user will teach the robot that he wants the robot to grab a glass and put it on the right of the bowl...
Diversity-driven curiosity-driven learning and transfer learning
Participants : Fabien Benureau [correspondant] , Pierre-Yves Oudeyer.
Diversity-driven selection of exploration strategies in multi-armed bandits
In [40] , we considered a scenario where an agent has multiple available strategies to explore an unknown environment. For each new interaction with the environment, the agent must select which exploration strategy to use. We provide a new strategy-agnostic method that treat the situation as a Multi- Armed Bandits problem where the reward signal is the diversity of effects that each strategy produces. We test the method empirically on a simulated planar robotic arm, and establish that the method is both able discriminate between strategies of dissimilar quality, even when the differences are tenuous, and that the resulting performance is competitive with the best fixed mixture of strategies.
Behavioral Diversity Generation in Autonomous Exploration Through Reuse of Past Experience
The production of behavioral diversity—producing a diversity of effects—is an essential strategy for robots exploring the world when facing situations where interaction possibilities are unknwon or non-obvious. It allows to discover new aspects of the environment that cannot be inferred or deduced from available knowledge. However, creating behavioral diversity in situations where it is the most crucial, i.e. new and unknown ones, is far from trivial. In particular in large and redundant sensorimotor spaces, some effects can typically only be produced by a few number of specific motor commands. We introduced a method to create behavioral diversity by re-enacting past experiences, along with a measure that quantifies this diversity. We showed that our method is robust to morphological and representation changes, that it can learn how to interact with an object by reusing experience from another and how scaffolding behaviors can emerge by simply switching the attention of the robot to different parts of the environment. Finally, we showed that the method can robustly use simulated experiences and crude cognitive models to provide behavioural diversity in the real world. This result are under review.